
2015
1st Jan 2015 OR Operations
Normal operation of a binon is that both source binons must fire coincidentally (P-Habit) or sequentially (S-Habit) to fire the binon. It is equivalent to an AND gate with the two source binons in a particular order. It is a Binand. It is like saying I see a cat’s head and a cat’s tail so I must have a cat. This is deductive reasoning. But what about the logic that makes an inference? This is inductive reasoning in which only part of the evidence is available. This is when we see a cat’s tail or a cat’s head and think it is a cat. This would be equivalent to a binon that operated as an OR gate. Either of the two source binons could fire the binon. It is a Binor. But how does a binor get created / learnt? Somehow a binand can operate as a binor. If a binand were primed maybe it will behave this way. And maybe the priming comes from a signal originating in a target binon. Maybe when a sequential binon receives a signal from its first source binon and is expecting its second source binon to fire it sends a priming signal down to the second source binon. The second source binon then is more sensitive and will fire if either of its two source binons fire. This is equivalent to saying expectations which originate from paying attention travel down the binon hierarchy priming / sensitizing the binons such that they act as binors. This is abductive reasoning. Note that sequential binons are required.
21st Feb 2015 Priming actions
The 14th Jan 2014 note makes some very relevant points about actions. It says: “Priming all the lowest level actons in a pattern of action at the beginning of a task allows the order of the stimuli to determine the order of the acts taken. This is necessary when certain events can occur anywhere during a task and you want the appropriate action taken and for it to be taken without conscious interruption. It also allows multiple acts to be done in parallel if their triggering stimuli are available / recognized.”
My new thinking is that paying attention is the process of priming / enabling. It comes from a target binons and enables a source P-Habit binon to act as a binor gate. When the trigger stimulus of an S-Habit binon occurs then the goal stimulus is expected. This expectation is the paying of attention to the expected source goal binon and it gets enabled. Paying attention to multiple A-Habits simultaneously allows for multiple actions to be enabled. And then efference copy stimuli form a tree of recognition of actions performed. When you pay attention to the efference copy binons they are enabled like any others. This is the process of doing the action habits. But at the leaves of the efference copy binon tree the enabling has to be converted into signals sent to the muscles / devices. I’m still thinking about how this occurs.
Where information
In pattern recognition there is what and where recognition. Perceptra does the “what” recognition based on shape patterns. The recognition of where must be based on a position in the one-dimensional array. The question is how to represent the “where” information. It needs to be relative. Is it the relative position of the objects? Is it based on the distance they are apart relative to their size? But if the smallest object is an edge it has no size.
7th March 2015 "Where" information
We have neurons dedicated to recognizing / measuring stimuli at all the positions in the visual space or the sound frequency dimension. As such they represent the "where" information of a stimulus by their physical presence. This would imply that "where" information is symbolic. Just like the alphabet each symbolic stimulus has an order / position relative to its neighbours and therefore I should produce dependent symbolic stimuli.
Gaps
Edges are the lowest level symbolic stimuli. When a change in some stimuli happens the relative distances between the edges that have changed produce a shape pattern. The distance between any two changed edges may span a linear area which includes many edges that have not changed. This allows for the recognition of objects that include gaps.
18th March 2015 "When" information
"When" information, just like "where" information is also symbolic. However the "where" and "when" dimension can be used to calculate a difference such as distance and duration which are then used to recognize the shape patterns. And shape patterns are "what" information.
20th March 2015 Ends
From my test run of 1st Jan 2015 of my 2D pattern recognition software I found a problem. Two errors occurred due to recognizing edges between pixels using the IDL to provide the JND between adjacent pixels. The values of the readings are:
4 14 13 Log Values = 7.60 14.47 14.07
16 16 16 15.21 15.21 15.21
14 12 1 14.47 13.63 0.00
There is no noticeable difference between 14 and 13 or 14 and 16 but there is between 13 and 16. This gives a horizontal edge between the 13 and 16 that sticks out in the middle of the 2x2 group of pixels. Similarly there is no noticeable difference between 16 and 14 and 14 and 12 but there is between 12 and 16.
The approach I am using is to create all these edges and then start combining them at the corners where they touch. Any two edges then produce a corner of a particular type with a length ratio. If the same area, made up of corners, is then found of a different size the ratios of the lengths would be the same. This would provide for recognition independent of size.
What I have realized is that I should continue to create / recognize these edges (horizontal in the above case) and combine them to form an end. An end is two parallel edges with no edges attached as corners at one or both ends. In the following scenario the two edges could actually float free without any edges attached to the ends. The horizontal edges are shown as — signs and no edges are shown as • signs in this scenario.
16 • 16 • 16
• — •
14 • 12 • 14
• — •
16 • 16 • 16
23rd March 2015 Attention
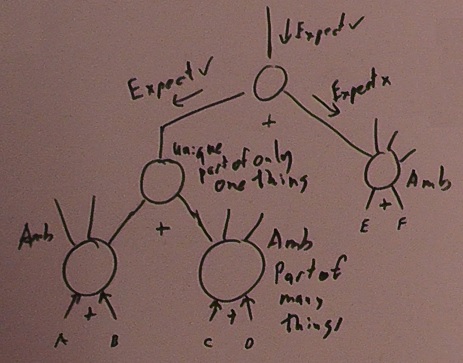
Continuing from the 21st Feb 2015 the question arises as to how far down a P-habit binon hierarchy does the priming propagate? From 14th April 2014, priming is the same as potentiated or set. Also note that if responses to actuators are to be kept / represented as efference copy stimulus binons that are performed as responses when primed then paying attention, which is the same as expecting/doing, is the same thing as priming. It should propagate down the tree as long as the binons only have one target binon, i.e. they are unambiguous. If a binon is ambiguous then it has more than one target binon and therefore is reused to recognize multiple things. The objective is to pay attention to something specific made up of parts. And we don’t want any of the parts that may also be part of something else to satisfy our attention. For example we are expecting a cat as the goal stimulus. A cat is recognized if we see a cat’s head, a cat’s tail or cat’s body. These are its parts and attention will be satisfied if any one of these is matched. But the cat head is made up of eyes, a nose, a mouth and ears. If we assume cat eyes might also be part of two other kinds of animals then we don’t want the recognition of cat eyes to cause the recognition of a cat. So we need to recognize the cat eyes and the nose for example. That is we need to match some combination of parts that is unambiguous.
What about the priming / paying attention of the goal stimulus of an S-Habit that contains an action? This goal stimulus is a P-Habit comprised of the efference and non-efference parts. The activation / priming of the efference stimuli needs to go down to the lowest level stimuli to get converted into responses to the actuators. But these efference stimuli are most likely ambiguous because they are reused in multiple higher level actions. But maybe it is the cerebellum that is doing these learnt / familiar actions and it works based on different principles.
Motor babbling
The only previous reference I have to babbling is 5th July 2012. This is the process of creating random responses and perceiving the feedback of efference copies and other stimuli. In the womb motor activity takes place, probably randomly and the brain perceives the feedback.
28th March 2015 Or operation and attention
A binand does not become a binor when it is enabled/primed/activated by attention being paid to it because it is expected. A binand as a source binon will always act as a binor if it only has one target binon. This is because the source binon is always a unique part of the target binon. A target binon is recognized if either of its source binons are uniquely part of it. Or in other words a source part that is unique to the target (not reused) is sufficient to recognize the target. The activation that happens due to attention / expectation identifies the stimulus pattern that should occur and cause no distraction and therefore continuation if it’s being done automatically. Matching expectations is equivalent to habituation to a pattern over time rather than habituation to the same stimulus value. It’s like saying to the binons in a P-Habit tree “don’t fire if you perceive your parts”. This would be true for familiar binons but for interesting or novel ones we want to perceive them so we can update their interest level. Actually this sounds like inhibition. But it should not stop the binons from firing. The whole tree must be active so one can pay attention to it if desired. It just stops the tree from attracting attention where the stimulus matches the expected and leaves the unexpected parts of the activation tree to attract attention.
29th March 2015 Novel S-Habits
While refining the attention – action cycle algorithm I realized that if I am to have any sequence distract the performance of an S-Habit then novel and interesting sequences must be formed automatically. The reasoning is based on the following thinking. When an S-habit is being done it is being done at a concentration level based on the redo interest in the sequence or the interest level of the goal. If that concentration level is “novel” then nothing can distract it. If that concentration level is “interesting” then a novel sequence should distract attention and cause the S-habit being practiced to stop. So, novel sequences need to be formed automatically before an active S-Habit’s expected goal stimulus (next trigger stimulus in the sequence) is matched. Similarly interesting sequences must attract attention if no S-habit is being done. Note that when these novel and interesting sequences are formed their interest level is not reduced like it is for P-habits. One must consciously practice an S-Habit to reduce its interest level.
1st April 2015 Attention – action cycle
For the last few days I have been refining the attention - action cycle and have developed the following algorithm.
0. The initial state will be either:
a) a conscious S-Habit being executed with an expected P-Habit stimulus and a concentration level of novel or interesting.
Or b) no S-Habit being performed, no expectations, and concentration level of familiar
1. Get stimuli from all senses / sensors and recognize / create all P-Habit binon combinations of familiar stimuli. Both source binons must be familiar before they can be combined.
This happens when a change occurs on any sense / sensor. This includes all areas of sensors that attention is or is not focused on. This includes creation of stimuli that are expected and unexpected. Novel stimuli get created and are remembered in the novel state. Is it possible that novel ones are only kept if they have attention paid to them? When we sleep the novel ones are probably pruned. Otherwise you end up with too many of them.
If and when P-Habits occur again they are changed to Interesting. The third time they occur they become familiar and can be combined with other familiar ones.
2. Combine all familiar parallel (P-Habits) stimuli into sequential (S-Habits) stimuli. To be created both parts (stimuli) of the sequence need to be familiar. Check the existence of sequences of individual properties and sequences of combinations of properties. Mark the sequence novel if it is not already known. If it is already known then don’t change its interest level. It has to be practiced before its interest level is reduced. For how long should novel or interesting S-Habits be kept?
3. For all the executing subconscious S-Habits find their expected P-Habit stimulus and continue or stop them. These S-Habits must be familiar / learnt and have been previously started. Stop executing those that don’t get their expected stimulus. For a given P-Habit trigger there may be many expected next stimuli that are part of familiar S-Habits. All of these are being done subconsciously in parallel. These S-habits grow their trees as their next expected stimuli occur or they just stop if it does not occur. It is necessary to perform all these S-habits because they may contain efference copy stimuli in them. And this is not known for a complex S-Habit in which the trigger is an S-Habit with no efference copy stimuli. One does not recognize this trigger until its last non-efference copy stimulus is perceived.
4. Determine what P-Habit would attract attention if we were not expecting anything. This will always be a level 1 P-Habit stimulus. The order of priority should be; Novel, Interesting, Familiar. A novel or Interesting P-habit stimulus at level 1 will attract attention first. A familiar level 1 stimulus will attract attention if it is used to form a higher level sequence that is novel or interesting. Unexpected familiar stimuli will cause novel or interesting sequences to be created.
5. Set the attended to stimulus to zero.
If we are doing a conscious S-Habit then this active sequence will have a goal that it is trying to achieve. The concentration level will be based on the interest level of the goal or the desirability (novel or interesting) of the redo interest of the active S-Habit. This S-Habit’s goal will not necessarily be the same as its next expected stimulus. If there is no active S-Habit then the concentration level is “familiar”.
6. Determine if there is any stimulus that distracts your attention. This would have an interest level higher than the current concentration level. If so then set it as the attended to stimulus and stop the active S-Habit (if any). Do not reduce the redo interest of the stopped S-Habit.
A novel stimulus will interrupt an active S-Habit that is being done at the interesting level. An interesting stimulus will not interrupt an active S-habit because the concentration level will be either interesting or novel for an active habit. Familiar S-habits are not practiced consciously they are being done subconsciously.
7. If there is an active S-Habit being done - expecting its next trigger stimulus,
If the expected next trigger stimulus occurs
If it is the goal of the S-habit then reduce the S-habit’s interest, clear the active S-Habit and attend to the goal stimulus
Else the habit continues and the expected stimulus is the attended to stimulus.
Else if the expected next trigger stimulus does not occur
the habit stops and its redo interest will not be reduced because its goal was not reached. Set the attended to stimulus to that part of the expected stimulus that did not match.
Else the attended to stimulus will have been set in step 6 and there is no active S-habit.
8. If there is no active conscious S-Habit then
determine what to do from past experience. Select an S-Habit to perform using the attended to stimulus as a cue. That is, if there are S-Habits whose trigger stimulus is the same as the attended to stimulus (the stimulus that has the focus of attention) and they have goals worth doing or desirable (novel or interesting) redo interests, then perform the most recent experienced one. Note at this point there must be a P-Habit being attended to.
9. If there are no S-Habits with goals worth doing or that have a desirable (novel or interesting) redo interest for the attended to stimulus then
check to see if a partial match of the attended to stimulus has any goals worth doing or desirable redo interest. Check part 1 and part 2 of a P-Habit
10. If still no S-habit worth practicing then find one through thinking.
Find an S-Habit that will lead to one that needs practicing or that will produce a rewarding final goal stimulus.
Pay attention to the goal stimulus of the attended to stimulus's most recent S-Habit and treat it as though it was the attended to stimulus and repeat steps 8 and 9 above. This is thinking of the goal by traversing the S-Habits for this stimulus as the trigger. This repeats until we come across an S-Habit that has a desirable redo interest or a pleasant expected goal stimulus.
There will be a limit on this looping to begin with. Some other criterion is required to stop this thinking. It must stop if it loops around to an already thought about S-Habit.
If it is successful the first thought about S-Habit will be selected for performing in step 11 as the active S-habit at the appropriate concentration level.
In a real-time system a thinking loop may continue until it is interrupted by an unexpected stimulus.
Should the thinking loop also select additional S-habits or should they only be started by a conscious stimulus?
Where does boredom fit in - results from repetition of a conscious stimulus? Or if we have a limited number of thinking steps we may not find an S-habit worth doing.
Should thinking be done after or before investigating attended-to's parts in step 9?
Thinking is based on recalling the goal stimulus of the most recent S-Habit for the attended to stimulus and letting the interest in this goal stimulus determine whether to perform the S-Habit. Should we store the thought as a thought so that it can be repeated if successful and learnt?
We are bored when the only S-habit we have to do is a familiar one or there is no S-habit to do. If we get the expected goal of a familiar S-Habit then the sequence is the next trigger.
11. If we have found a new S-Habit to perform then
activate it, and
set the concentration level.
Should all the learnt (familiar) S-habits of the attended to stimulus also be started as subconscious S-habits?
12. Perform the actions of all continuing familiar S-habits that contain efference copy stimuli as part of their next expected stimulus.
Perform the acts for the lowest level P-habits in the S-habits.
Somewhere in the process we must have a point and criterion for starting these familiar subconscious S-habits. Is it in step 11?
13. If we have an active S-habit then
set the next expected stimulus and perform the act for the efference copy stimulus part of its next expected stimulus. These acts will override any that are being performed by the subconscious familiar S-Habits in step 12.
S-Habits
An S-habit is a sequence of two source binons. The first source binon is performed / expected / perceived before the second. The first is its trigger and the second is the goal. When it is for an action sequence such as walk to another room it is made up of a tree of such S-habits. However, when “walk to another room” is activated other S-habits are activated in parallel. For example step over obstacle, go around obstacle, and open closed door. These are part of the walk to another room but are not done in sequence. They are active and done when their trigger occurs. Examples of these triggers are observing an obstacle or encountering a closed door.
So what does the binary tree structure look like that captures these sorts of possibilities? A level 1 S-Habit must be a sequence of two P-habits. If it was a parallel (simultaneously recognized) combination of two P-Habits it would be a P-Habit. Then a level 2 S-Habit could be a sequence of two level 1 S-habits which would represent three P-habits happening in sequence. Or a level 2 S-Habit could be a parallel combination of two level 1 S-habits which represents two sequences that could occur in parallel. It is equivalent to an “or” combination. When it is performed both its level 1 S-habits are activated. If either of the two level 1 S-habits’ triggers occur then they would be performed.
We effectively have two types of S-habits, parallel and sequential. When a parallel one is activated both its source binons are activated. When a sequential one is activated only its 1st source binon is activated. Its second source binon is activated once the 1st source binon has been perceived.
Sequential / Parallel
Generalizing these ideas would result in all binons having the sequential / parallel property (SP property). The question would then be; can two source binons have different SP properties? Or are there some constraints such as the two source binons must both be sequential or must both be parallel? And could two source binons both be sequential but be of different duration (different level of complexity)? The answer is yes as long as they are parallel to each other. And could they start and end not in synch but still be part of the same target binon? I think so as long as the target binon is parallel.
So why doesn’t scratching my head while walking to another room get combined in parallel, if I practice it often enough? Yet opening a door does get combined in parallel once it is learnt. Opening a door helps achieve the end goal while scratching one’s head does not. Opening the door was done the first time as a problem solving strategy to walking to another room. When it succeeded it was combined in parallel. Scratching one’s head was done in parallel because its trigger occurred during the walking, it was thought about and when performed it did not conflict with the resources used for walking. However, if it had occurred during opening the door and it was only possible using the same hand as opening the door (maybe you were carrying something in the other hand) one would not have done it at this time.
2nd April 2015 Sequential / Parallel
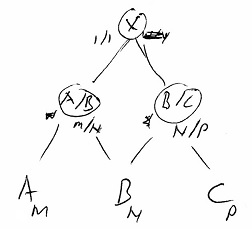
If an S-Habit binon X (sequential →) is normally made up of two source S-Habit binons Y and Z then the rule is that the second binon B of the 1st source binon Y must be the same as the first binon B of the 2nd source binon Z. If, however, the two source binons Y and Z are of different SP properties or they are both P-habit binons (parallel +) this cannot happen. Effectively the two source binons are at level 1 complexity for the S-habit binon X.
1 X 2 X 3 X
/ →\ / → \ / → \
Y Z Y Z Y Z
/→\ /→\ / + \ /→\ / + \ / + \
A B C A B D E A B D E
Similarly, if a P-habit binon M (parallel +) is made up of two source P-Habit binons N and Q then the rule is that the second binon T of the first source binon N must be the same as the first binon T of the second source binon Q. If however, the two source binons N and Q are of different SP properties or they are both S-habit binons this cannot happen. Effectively the two source binons are at level 1 complexity for the P-habit binon M.
4 M 5 M 6 M
/ + \ / + \ / + \
N Q N Q N Q
/ + \ / + \ / + \ /→\ /→\ /→\
S T U S T V W S T V W
The use of a P-habit such as Y in scenario 2 as the first source binon in an S-Habit sequence X with an S-habit Z as the second source binon allows for the association of a complex situation Y to be the trigger for an S-habit binon Z such as avoid obstacle. The trigger Y is the perception of the obstacle. If however Y was sequential and Z was parallel then Z could represent the goal of the avoid obstacle S-habit Y. Scenario 6 would allow for two sequences to be activated in parallel and they would only start when S and/or V were perceived.
3rd April 2015 S-Habit creation
I realized that I should be merging step 2 and 3 in the attention-action cycle. It is the subconscious execution of familiar S-habits that perceive and thus create the known S-habits. The previous step 2 and 3 are as follows.
2. Combine all familiar parallel (P-Habits) stimuli into sequential (S-Habits) stimuli. To be created both parts (stimuli) of the sequence need to be familiar. Check the existence of sequences of individual properties and sequences of combinations of properties. Mark the sequence novel if it is not already known. If it is already known then don’t change its interest level. It has to be practiced before its interest level is reduced. For how long should novel or interesting S-Habits be kept?
3. For all the executing subconscious S-Habits find their expected P-Habit stimulus and continue or stop them. These S-Habits must be familiar / learnt and have been previously started. Stop executing those that don’t get their expected stimulus. For a given P-Habit trigger there may be many expected next stimuli that are part of familiar S-Habits. All of these are being done subconsciously in parallel. These S-habits grow their trees as their next expected stimuli occur or they just stop if it does not occur. It is necessary to be performing all these S-habits because they may contain efference copy stimuli in them. And this is not known for a complex S-Habit in which the trigger is an S-Habit with no efference copy stimuli. One does not recognize this trigger until its last non-efference copy stimulus is perceived.
The new step 2+3 must change all the P-habits and parallel combinations from an unexpected to an expected state. If a P-Habit is novel or uninteresting it will naturally remain unexpected since the subconscious familiar S-habits that are executing are only made up of familiar parts. If all the P-Habits and combinations are expected then all the familiar S-habits being done have occurred and there is no unexpected stimulus to distract attention from performing the S-habit that it is practicing.
2+3. In step 1 Mark all the P-habits and parallel combinations as unexpected. For all the executing subconscious S-Habits find their expected P-Habit stimulus and mark it as expected. Continue performing the S-habits, forming the S-habit tree and leaving them in the executing state if they have more stimuli in their sequence. S-habits that don’t get their expected next P-Habit stimulus will stop executing. S-habits that reach their conclusion (final stimulus in their sequence) will also stop.
This then raises the question, when does a novel S-Habit get created? It first comes into existence when conscious attention is paid to a stimulus. Its trigger must be the previously conscious attended to stimulus. Its goal is the currently attended to stimulus. The trigger does not necessarily need to be a P-Habit. It may be the S-habit which is being executed/practiced or has just completed and reached its goal. Similarly can the goal attended to be an S-habit? It may be if all stimuli after step 2+3 are familiar and expected. Then the one that attracts attention will probably be the biggest P-habit / longest S-Habit perceived / experienced. If the trigger was an S-habit and the goal an S-habit we probably will form the next level up S-habit.
12th April 2015 Unexpected Stimuli
Novel and Interesting stimuli and combinations that are novel and interesting are naturally unexpected. But familiar stimuli and combinations of them can also be unexpected if there is no sequence (S-Habit) that has formed that expects them as their goal.
Every familiar binon (P-Habit or S-Habit) that has just occurred is expected to repeat until it does not (fails to get itself). Thus for every familiar experience just perceived I need to start a subconscious S-Habit that is expecting itself as the goal. And when it does repeat it is expected and familiar and therefore does not attract attention. Attention is paid to unexpected stimuli so they become conscious and only these can form novel sequences (S-habits) with the previously conscious stimuli. S-Habit can only become familiar by being consciously practiced. Thus after the most unexpected stimuli have had attention paid to them (all stimuli are expected and familiar) we must find a novel or interesting S-Habit to practice. This is where I need to think about the criteria for identifying this S-Habit. Currently I look for any novel or interesting S-Habits in which the attended to stimulus is the trigger. I’m going to try using the largest familiar expected stimulus because it is the one that most specifically represents the current situation.
13th April 2015 S-Habits
All S-habits, conscious and sub-conscious continue until they get an unexpected stimulus or reach their goal and don’t repeat.
18th April 2015 Habituation
I have been keeping a list of active S-Habits and checking them against perceived stimuli every cycle. This causes the perceived stimuli to be expected or left unexpected. I have then been paying attention to one of the unexpected stimuli. This is then combined with the previously attended to stimulus to form a new S-Habit. I have also been starting up repeater habits for all perceived stimuli because they habituate after becoming active and are expected to repeat. But now I want to keep track of how many times the previous attended to stimulus repeated and how many times the currently attended to stimulus repeats. The ratio of the repeats is then used in creating the combination of the two stimuli. This has required keeping the previous two attended to stimuli and only combining them when a change in attended to stimulus occurs. It also means that the criterion for keeping the currently attended to stimulus, as a previous stimulus, is just that it is has changed and not that it was unexpected.
Now the process of checking to see if an S-Habit gets its expected stimulus must wait for the appropriate number of repeats. Also an S-Habit should not start unless the trigger has repeated enough times. These steps must now be event driven based on a change in stimulus. This is too complex and a simpler solution is required. I think that each binon must keep track of its number of repeats and its own habituation rather than have a list of active S-Habits. The idea would mean that every time a source binon fires in a sequence (no gaps) it increases its count of repeats, remains active and lets all its target binons know. Each target binon is waiting for its trigger source binon to stop firing and when that happens it expects its goal source binon to start firing. If the goal source binon fires enough times in sequence that the IDL ratio of the target binon is reached then the target binon fires. Will it continue to fire as long as the goal source binon fires and the value of the IDL ratio is met? If the goal source binon stops firing before the ratio is reached then the target binon becomes inactive. It didn’t get its expected goal.
This approach may work for recognition but what about learning – forming new S-Habits. This would seem to happen when no target binon is active that is recognizing the current stimuli. A habituating binon might fire all its known targets as a trigger when it stops habituating because a different stimulus occurred. If there is no target then a new incomplete one would be formed with the different stimulus as its goal source binon. The targets would then all be waiting for their goal source binons to fire. Every time a goal source binon is stimulated it would fire and the target would stay active. A newly created Target would count up the number of times the goal source binon fires until it stops at which point it would calculate its ratio.
I will still need a list of active binons. However the list does not need to contain information that can be kept by the binon, such as its state and level of activation (count of goal repeats). I will still need the attended to binon and this should be an active binon that is currently represented by my conscious S-Habit.
If the target binon is unique (only one) then when the source binon is perceived the target binon is perceived. Expecting because attention activates the binon tree.
Every actuator / device has an S-Habit it is doing at all times, even while doing/repeating the same action – holding steady.
Every sensor has a binon recognizing what it is reading at all times. The sensor is the binon.
Similar means that a subset of the properties matches.
Same means that a subset of properties matches and is unique.
Use the smallest set of properties required to match.
Generalize means use the smallest subset of properties required. When used in a sequence T1 & T2 gives a unique goal the first common subset of the parts, or T gives G1 & G2 – a generic subset of Gs.
To get a device to do something should I send it a ratio? It was 2 and is now 5. Thus I could send it a change amount. Or should it be a new position which would not be symbolic?
1st May 2015 Consciousness
This is an accurate description of consciousness from the most recent May/June issue of Scientific American Mind.
“Although opinions differ, I think it is helpful to start by describing consciousness simply as introspective access to mental states. That is to say, you, the subject of consciousness, are conscious of mental states – perceptions, memories, wishes, and so on – just in so far as you know about them by looking in on your own mind.”
And “You find you can reflect on what’s going on. And this capacity for self-reflection supports a second important function of consciousness: to allow you to appreciate how your mind works.”
This compares well with my idea that consciousness is a process that is monitoring and controlling other processes. The other processes are those of perception, memory, attention, value analysis and motor activity. Consciousness is starting, stopping and monitoring these other processes. An example is when you have that tip of the tongue feeling. This is an output from your memory recall process that is input to your consciousness process.
Habituation
What is happening here is the recognition of a sequence in which a stimulus repeats and then another one repeats and the new target binon represents the ratio of the repeated stimuli. It’s the same as recognizing widths of equally intense sensors on a linear array of sensors except the dimension is not space but time. So an activation tree must be built of binons and it must contain the count of the repeats of any binon at the level it was recognized. It is effectively the STM of attended to stimuli.
My previous note on STM was 31st March 2014. I now suspect that both sequences of P-habits and P-Habits of sequences must be formed. The principle is that all possible combinations must be able to be formed and represented. Which ones actually get formed will depend on how frequently they have occurred. The principle of each one having to go through the three states of novel, interesting and familiar before being used to form a higher level binon will be influenced by their frequency of occurrence.
The STM of attended to stimuli can’t keep growing for ever. Should it be flushed when we purposefully change our attention? Or should older binons be removed based on some other criteria? I believe the solution is that only familiar stimuli can remain in STM because if an S-Habit in STM is novel or interesting it can’t be combined with the next stimulus because it is not familiar.
4th May 2015 S-Habit Completion
At the start of a cycle a sub conscious S-Habit is waiting for its goal stimulus to repeat or not. It completes successfully because a different stimulus indicates that its goal stimulus is not going to repeat. The S-habit is then added to the perception list. But really it was perceived in the previous cycle. So the question arises, should a sub-conscious S-Habit complete when the ratio of length of trigger to length of goal is reached rather than when a different stimulus indicates its goal has not repeated? And then if the answer is yes should it complete when the ratio is first met or only when it is exceeded?
Think about the scenario in which you tell your partner you are going out to buy groceries and you will be back in about an hour. You leave. Your partner starts executing a sub-conscious S-Habit that expects you to be absent for about an hour. Its goal stimulus is not your arrival upon return. Its goal is a period of time during which you are absent. This mean the S-Habit will be recognizing the state of your absence for about an hour.
Scenario 1 - You return in about an hour and the S-Habit terminates when you arrive and the duration of your absence was expected. The period of absence does not attract the attention of your partner.
Scenario 2 – You return in 5 minutes because you forgot your car keys. The S-Habit terminates prematurely. Your short period of absence is unexpected because the S-Habit did not complete. This is based on the principle that S-Habits that recognize their goals decrease the expectedness of those goals leaving the unexpected to attract your attention.
Scenario 3 – You return 2 hours late but your partner was so busy watching a movie that they had not noticed your absence. The S-Habit completed when its absence time expectation ran out. That is when the absence time was greater than the end of the expected absence time. The state of your absence is now unexpected but familiar enough that it does not interrupt the more interesting task of watching the movie. Only upon your arrival which is more interesting than the movie does your partner then consciously notice the longer than expected absence time.
Scenario 4 – You return 2 hours late and your partner says they were worried because you were absent longer than expected. This happens because sometime after the S-Habit completed but before you returned your partner performed some task or thought in which your presence was required and they noticed that you were not present (i.e. absent).
These scenarios seem to imply that a sub-conscious S-Habit should complete when the ratio of length of trigger to length of goal is reached rather than when a different stimulus indicates its goal has not repeated. And it implies that it should complete only when the ratio is exceeded?
A similar thought experiment can be done for a trigger stimulus that must last for a given duration or repeat a number of times. What if I want you to tell me when about 30 seconds has elapsed but you have no watch and must do it mentally. You are instructed not to count. You then start concentrating trying to estimate when 30 seconds has elapsed.
Scenario 1 – In about 30 seconds you tell me the time is up. You were consciously executing the trigger of the S-Habit up to the end. This is where this thought experiment differs from the grocery buying one. The S-Habit needs to be conscious if the trigger is a repeating or timed one.
Scenario 2 – Another person starts talking with you and you lose track of time.
16th May 2015 Reinforcement Learning LinkedIn Group
Tom and Wojciech, Thanks for the answers and references. I have always believed that novelty and familiarity could be used as the reinforcement in RL. I also believe as babies and toddlers most of our learning (actions and recognition) is reinforced through novelty and familiarity. We do not need pleasurable and painful experiences to learn most things.
24th May 2015 Real numbers
I was wondering if allowing binons to contain real numbers (with decimal places) rather than integers would allow for more flexibility in recognizing patterns. However the binons still have to be symbolic such that a range of real number values has to map to the same value because there is no noticeable difference between the numbers in the range. What that symbolic value is does not matter just as long as all the numbers in the range map to the same one. And I don’t want overlapping ranges as in fuzzy logic because that introduces a degree of non-determinism.
2nd June 2015 Conscious S-Habits
I’ve been thinking that there is no need to label some S-habits as conscious and others as subconscious. By using the conscious label I have been meaning that it is being practiced while a subconscious one is expecting a repeat of a perceived stimulus. The conscious / subconscious distinction is more important for paying attention and labeling the perceived stimuli. And the practicing versus automatic S-habits distinction is more important for identifying the stimulus that one is expecting. When the to-be practiced S-Habit is identified and before it is started it provides the stimulus that is to-be expected and thus directs the attention to focus on it in the next cycle. Its interest level also provides the concentration level. The execution and recognition of the goal of the S-Habit causes its interest (novelty / familiarity) to be reduced. So if I remove the conscious / practicing label from the S-Habits will it affect the process? I would have to keep the to-be expected stimulus and its concentration level separate from the S-Habits.
14th June 2015 S-Habits
I’ve been trying to design the algorithm for recognizing sequential / temporal patterns as a hierarchy of binons in which a binon at any level represents the ratio of the number of times its two source binons repeat.
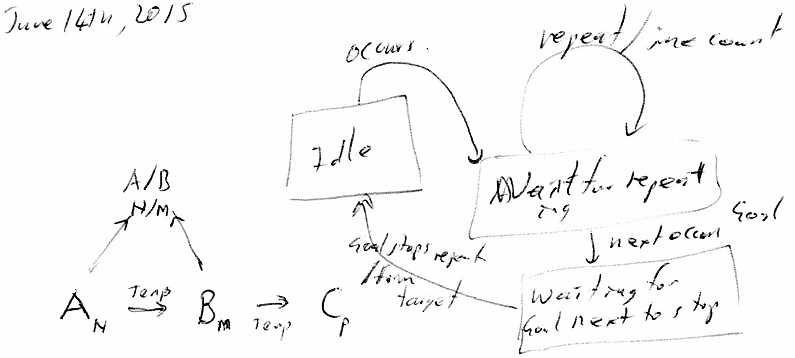
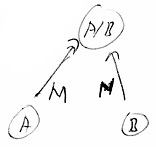
A repeats N times – stops habituating when
B occurs and A linked to it waiting for B to stop
B stops (linked to C)
Based on Familiarity of A & B – don’t form A/B, - create new A/B, - start A/B 1st time, - repeat A/B
15th June 2015 Binon states
20th June 2015 S-Habits
A occurs 1st time – has no targets – create target A/B expecting A to repeat. A repeats and A/B counts the repeats. B occurs instead of A, A/B starts counting Bs. Bs repeat expecting Bs. (Also created B/C expecting B to repeat). X occurs (not a B). The A/B is BN (brand new) and the ratio is calculated and stored. A/B is inactive. A occurs, starts A/B waiting for A to repeat. It does and it is counted. If an unexpected X occurs? - Should A/B be counting the As and the Bs or should the As count themselves?
A counts itself – A occurs 1st time – has no target – expects itself to repeat – A repeats and increments is count. B occurs instead [create target A/B maybe] B counts its own repeats until X occurs (not a B). Then create target A/B [or match existing].
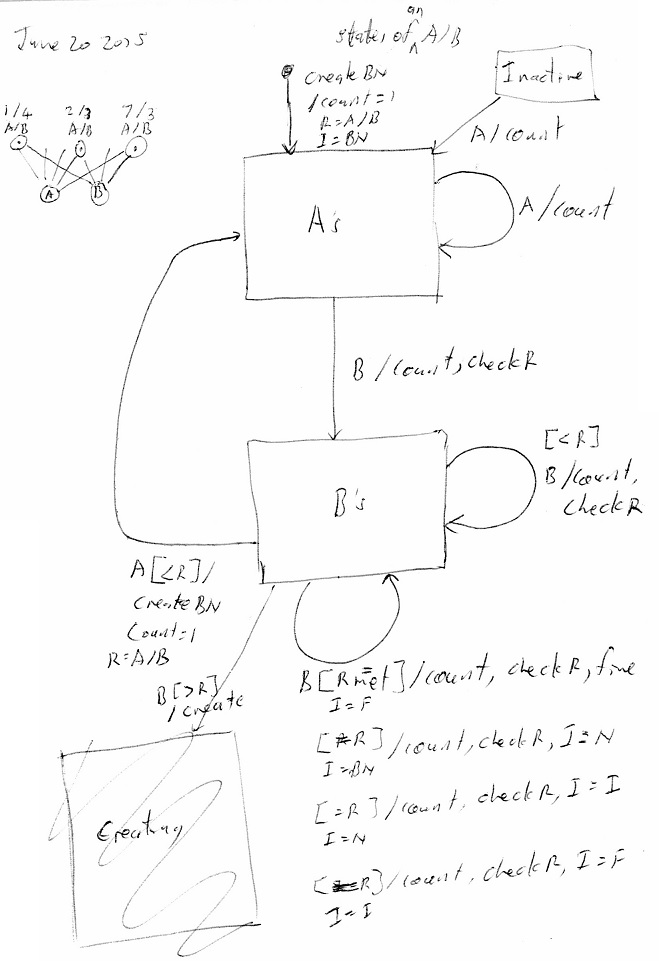
When A stops repeating because it did not get its expected it fires all targets and gives them its count N. They then use their ratio R to determine “how long to wait” for expected B and its count. When B stops repeating it fires all its targets and gives them its count. If the ratio matches it (A/B) counts and expects a repeat. If B is too little or too much A/B does not count and did not get its expected and A/B fires all its targets with its count.
Does B notify A/B to stay alive every time a B occurs?
21st June 2015 S-Habit design
A/B occurs when B fails to repeat and have C (not an A). If C then? If A/B count>1 then A/B count is trigger (level=1 equivalent) waiting for C/D as goal. Take last occurrence of A/B and get ready to create B/C when D occurs and then form X=A/B / B/C.
What if C is another A? Traditionally I have formed the B/A and when the A/B repeats I would compare it with the history at the same level (level = number of items previous) and see if it is the same and then remove the B/A in between.
Whenever a binon X at level>1 repeats the binon with this count acts like a level=1 sensory input. It (X) needs to wait for the next binon Y at the same level to repeat and then fail to repeat and then we can combine them X/Y with a ratio of counts to form a level+1 Z binon with a non-zero IDL.
We also need to take the last one of the binons X and combine its 2nd source B binon with the next binon C to form the overlap. It combines with 1st occurrence of B/C because if B/C is at a level>1 and it repeats then the common overlap does not exist. The overlap only exists with the 1st source binon B of B/C.
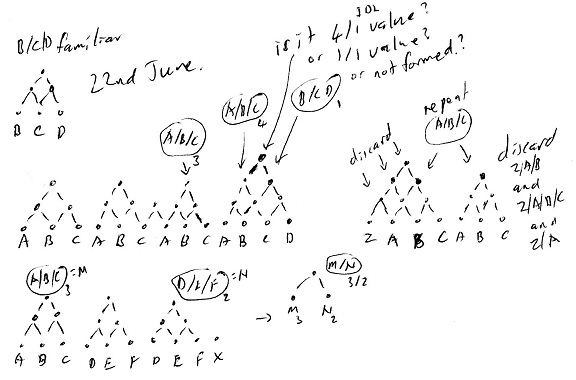
22nd June 2015 Repeats
30th June 2015
See the 2015 Scientific Research and Experimental Development (SR&ED) tax credit claim.
Details about the Canadian Revenue Agency’s SR&ED tax incentive program are here.
13th July 2015 "Repeaters"
In the previous notes I concluded that once any repeater is encountered at any level then the repeating pattern is not combined as an overlap with any further stimuli on its left or right, or before or after it if it is sequential. This means if ABCDABCD is immediately followed by XYXYXY then D is not combined with X. Also the ABCD is a level-4 binon pattern while the XY is a level-2 binon pattern. And since they are beside each other, if they are both familiar then they should be combined with a ratio of 2/3 since this is their respective counts. This is the first time I have combined binons that are not at the same level. However it makes sense in this situation. It is like finding the edge between two regions of sensory readings to form a level-1 property binon.
The challenge becomes one of how to parse a sequence where there are two possible interpretations of the edge. Let us assume the sequence RENT and ENTER are both familiar as is RENTER. Then the sequence RENTRENTRENTERENTER could be parsed / recognized as RENT RENT RENTER ENTER. Or if RENTER was not familiar as RENT RENT RENT ER ENTER or RENT RENT R ENTER ENTER.
27th July 2015 Repeats
So a binon that repeats (at any level) can be combined with an adjacent (next to / beside / not overlapping) binon of a different level. These binons are objects that are re-identifiable. There is an edge between them. If the edge is an “edge in time” then we have 2 sequential binons that don’t overlap and the 1st represents a trigger – potentially complex (level > 1) and a goal – potentially complex (level >1). These repeater binons are internally consistent – maintain their pattern / structure – the pattern that makes them recognizable – re-identifiable. I need to distinguish between a binon that represents 2 binons adjacent to each other and 2 source binons that overlap.
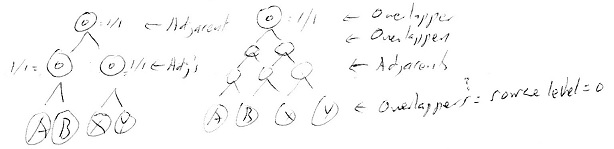
A binon can be an “overlapper” – 2 source binons overlap or are “adjacent” – 2 binons non-overlapping
Can make an adjacent out of 2 overlappers
Can make an overlapper out of 2 overlappers – common sub source binons
Can make an overlapper out of 2 adjacents – common sub-sources
Cannot? Make an adjacent out of 2 adjacents
Overlappers value always =0 = 1/1 ratio – both source binons at the same level of complexity. Adjacents value = any integer
An overlapper is not made up of independent parts.
2nd August 2015
Consider the phonemic restoration effect. In this auditory phenomenon, when a non-speech sound is inserted in place of a phoneme in a word, the auditory perceptual system (i.e., the part that detects the sound) responds as if the phoneme were present. (Samuel, Arthur G (1987). "Lexical uniqueness effects on phonemic restoration". Journal of Memory and Language 26 (1): 36–56)
9th September 2015 Action Habits
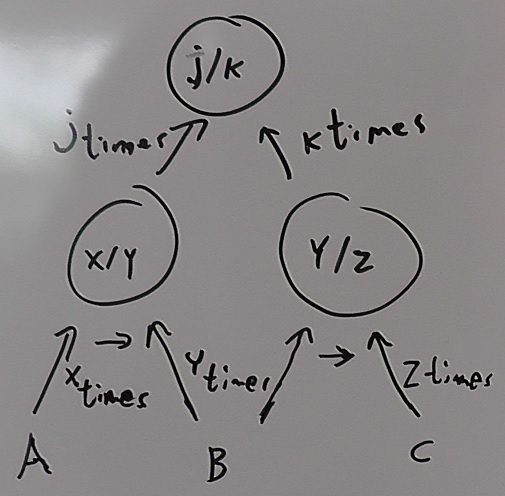
I’m thinking through the process of creating and then recognizing a sequential pattern.
- A fires X times until B fires
- B fires Y times until C fires
- Now form (create) X/Y binon (sequential) Source A –> B Novel
- A fires again once and X/Y becomes active and all other binons for which A is the first source.
- A fires n times until B fires
- X/Y is expecting B to fire m times where n/m = X/Y and so are all the other binons for which A is the 1st source binon.
- Less – if B has fired v times (v < m) when C fires then X/Y binon becomes inactive (idle)
- Equal – if B has fired m times when C fires then does X/Y fire? Or does it fire each time m is within the JND? No it stays expecting
- More – if B has fired w times (w > m) when C fires then X/Y binon becomes inactive (idle)
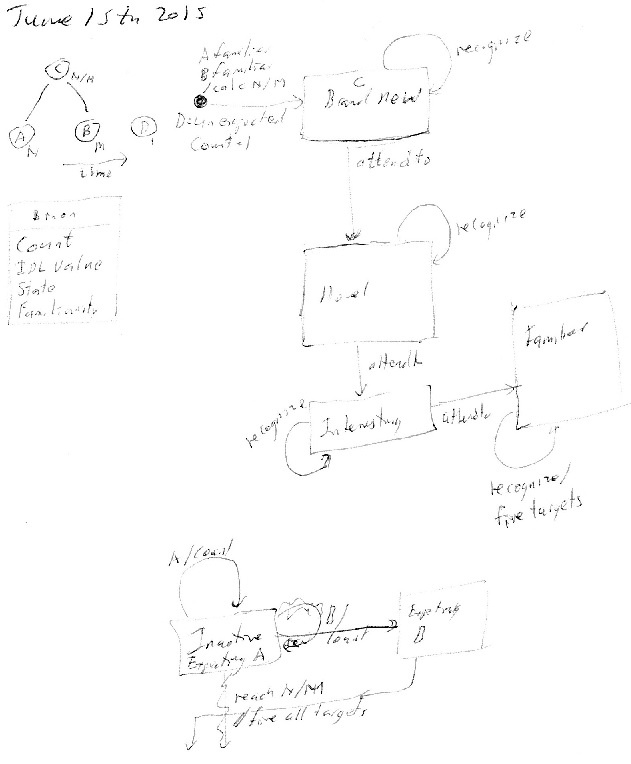
The Active state = the Perceiving state in the following diagram. (I decided to use the word “Active” for the state of a binon when it has been primed / attended to / potentiated)
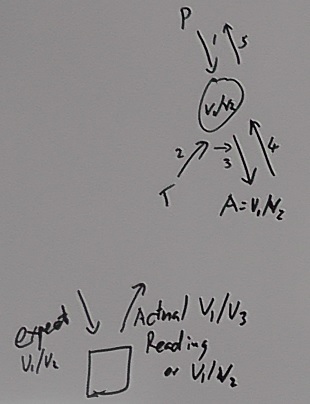
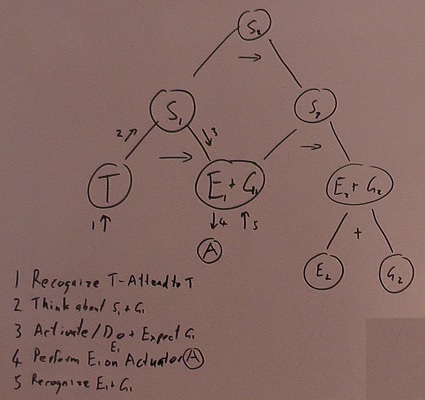
In this diagram I am illustrating the order in which a binon might be used in order to perform an action. The binon is primed in step 1 from a target binon. It sits there in the Perceiving state waiting for 2 the trigger stimulus. When the trigger occurs the binon activates 3 the 2nd source binon which must be associated with a device sensor except the signal is sent to the device to get it to perform the action. This is equivalent to setting the set point of a motor control plant. The horizontal arrow between the 2 and 3 signals indicates the passage of time and that the binon is a sequential one. Assuming the device performs the action as indicated the device sensor detects this and the incoming stimulus is 4. The binon then returns a stimulus to its target as 5.
Attend to = Expecting 2nd source binon = Anticipate = Prediction = Expectation = Goal
= Prime 2nd source binon? – waiting for its trigger.
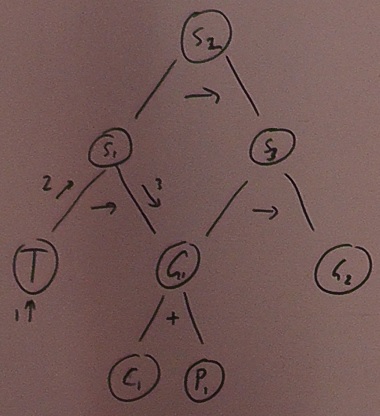
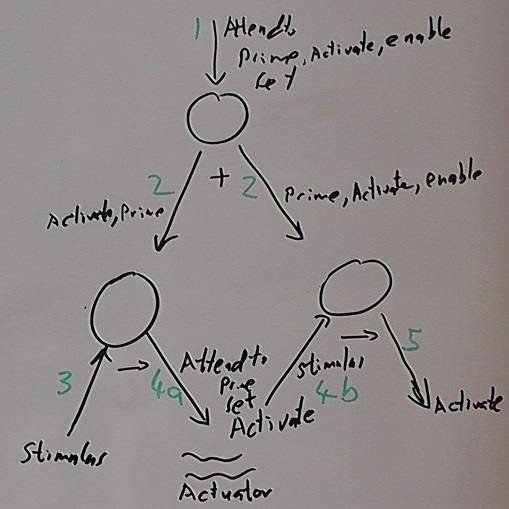
In this diagram I use a plus symbol below a binon to indicate it is a parallel binon. The two signals (2) are sent in simultaneously to activate the two source binons. The two source binons are sequential, indicated by the small horizontal arrows underneath them. Note that attending to a stimulus / binon is equivalent to what psychologists have traditionally called “set” and Gallistel calls “potentiate”. Other words for this could be “prime”, “activate” or “enable”. It is the process of anticipation, expectation or prediction of a goal. In this diagram the wavy lines are the device / actuator and it does not reproduce the requested 4a action. Instead stimulus 4b comes from its device sensor and the second binon has been learnt, is in the perceiving state and ready to handle this unexpected stimulus. Or 4b could be the expected stimulus and the action 5 is the next action to perform in a learnt sequence of actions.
14th September 2015 Expectations
If a target binon has independent source binons (that is different property binons) then either source binon that occurs will cause an expectation of the other.
27th September 2015 Activation
I’m now trying to think about activation of a binon when it is attended to in the same way as I have thought about perception.
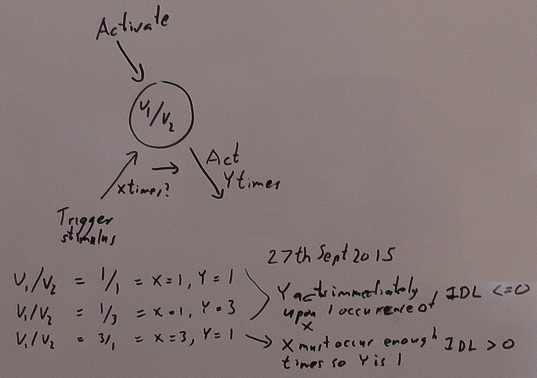
We have a sequential binon that is activated. Its ratio is V1/V2. When its trigger stimulus is perceived it activates its 2nd source binon Y times. Based on whether the ratio is zero or negative it activates the 2nd source binon immediately Y times. If the ratio is positive it must wait for the 1st trigger source binon to fire X times sufficient that Y is at least 1.
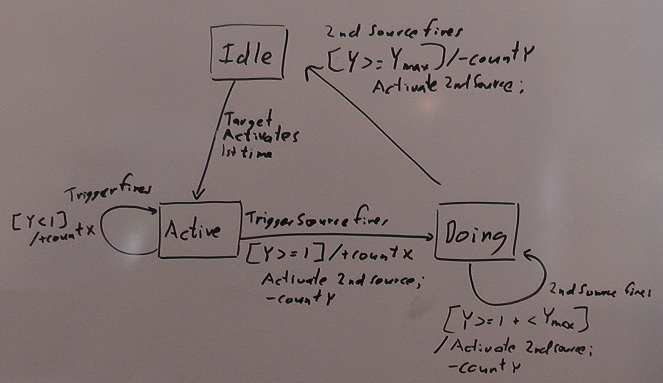
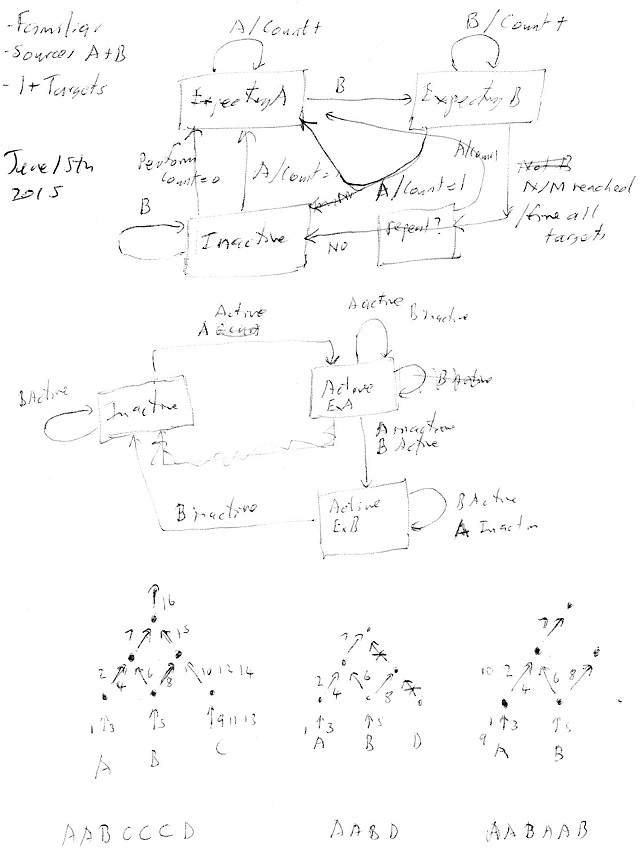
This is an incomplete state diagram for the binon. It gets activated the 1st time when it is attended to. It is then in the “active” state waiting for the trigger stimulus. When the trigger stimulus has fired sufficient number of times it activates its 2nd source binon to do the action. It is then in the doing state. While here it continues to activate the 2nd source binon so that the device stays in the required “position”. This happens every time the devices sensor causes the second source binon to fire. Once the sequential binon has activated the 2nd source binon more than the maximum Y value (based on the IDL) the sequential binon returns to the Idle state. Or should it return to the Active state so the sequence can repeat? What about the 2nd sequential binon in series with this one. It will also be in the “active” state and the stimulus from the 2nd source binon will be the trigger stimulus for it to go to the doing state. Maybe it is at this point that the sequential binon should transition to the “active” state.
When does the binon transition to the idle state? Maybe this should happen in a wave through the binons as it happens for “perceiving” and “expecting”. If the 2nd source binon becomes idle so should this sequential binon. If the sequential binon has the device as its 2nd source binon and the 1st source binon is a device sensor then this will not work. The wave of activation for the sequential binons to become idle must come from above, from the target binons. This is most likely because something else has been attended to / activated.
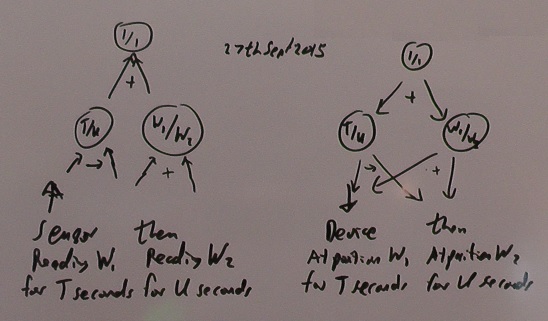
What does the signal sent to the device really contain from an information perspective? If it is to mirror the information sensed by a device’s sensor it must be a series of readings W1 and W2 in which W1 lasts for T seconds and W2 lasts for U seconds. This requires two property binons, one for the ratio of readings and the other for the ratio of durations. But the state diagrams for perceiving and acting are based on a sequence of firings / activations not on durations. The Ws are the positions sent to the device – it is probably the ratio that is sent to the device so it can change by the given relative amount rather than absolute positions. The duration ratio implies there is a ticking clock and the T/U binon is receiving (is fired by) a stimulus every time it ticks. This must be then somehow used to control the speed at which the device makes the relative position change of W1/W2.
The sequential perceiving state diagram for a binon can also be used to process an array of simultaneous / in parallel sensors as in Perceptra. The sensors are scanned sequentially. The perception of each one is then equivalent to a source binon firing. And I should try combining both the shape / quantity in a row property binon with the edge binon that indicates the change in reading property. The change in reading is either B/W or W/B (W=White, B=Black) in a black and white image and is the contrast property binon for more detailed images. This would then allow for distinguishing between positive and negative images. But when we read text we are equally at ease reading black letters on a white background as white letters on a black background. This would seem to imply we just use a shape property hierarchy for this purpose or that we have an “OR” simultaneous binon as well as an “AND” simultaneous binon. The “OR” binon would allow the positive or the negative image of a letter to trigger the same binon. Or this should actually be done with associative binons. Then the negative and positive image binons for the same letter would be associated with the same concept binon for the letter.
28th Sept 2015 Device control
If a device is sent relative (ratio) change requests and device sensors produce relative (ratio) change readings there is no need for binons to represent any particular units such as inches, centimeters, pounds or grams. This allows for us to sign out name with a toe in the sand or with your hand holding a pen and writing on paper. It is a series of relative motions.
19th October 2015 Parts and Patterns
On the 27th July 2015 I documented my ideas about repeating patterns becoming parts such that they could not be combined in an overlapping manner. Then adjacent parts can be combined to form patterns.
One key property of patterns, if their source binons overlap, their ratio is 1/1 and their IDL is zero. However two adjacent parts can be combined and that always forms a pattern.
A part is internally consistent – contains a pattern, but may be adjacent to many other parts. The edges can vary; they are used as more than one 1st source and more than one 2nd source binon.
We form a pattern from parts. Patterns are ratios of quantity of parts. Parts have values, not ratios. These are counts or quantity of times they repeat, or ratio of source parts? That is patterns of parts. If a familiar pattern occurs with a new one on its edge the pattern becomes a part – it is reused in a different context.
Can I use the level of interest to determine when a pattern becomes a part? The levels would be:
- Novel,
- Interesting,
- Familiar (patterns are formed by overlapping familiar patterns or combining adjacent parts),
- Part – no overlap, counted, can be combined at different levels of complexity.
Or should I use the rule that as soon as it is used as more than one 1st source and more than one 2nd source it becomes a part?
When two adjacent parts are combined they form a pattern – not another part. This pattern must become familiar and have the chance to be part of a larger pattern before it becomes so familiar that it becomes a part.
Activation tree
Yesterday I was modifying the activation tree processing to recognize parts and eliminate the patterns that overlapped with them. I was also eliminating the second of any two parts that overlapped. This is where there are always two possible interpretations of ambiguous figures. The same process was also counting adjacent parts so that a pattern formed from two parts could contain an IDL ratio of the counts of the two parts. I have realized that even though there is a tree of activation I could process the tree in a one dimensional array in which combinations replace the previous entries. This might allow me to retain parts at one level and have them adjacent to parts that are at a different level in the same linear array. Then they can be combined to form a pattern in which the two parts are of different complexity.
21st October 2015 Conscious S-Habits
On the 2nd June 2015 I decided to remove the adjective “conscious” from the S-habit that is being practiced. The one being practiced contains the action to be performed and the expected / goal stimulus to be attended to. However in parallel there are lots of other S-habits that are active / expecting that contain the same previous trigger S-habit pattern. This previous trigger S-Habit pattern is what is conscious.
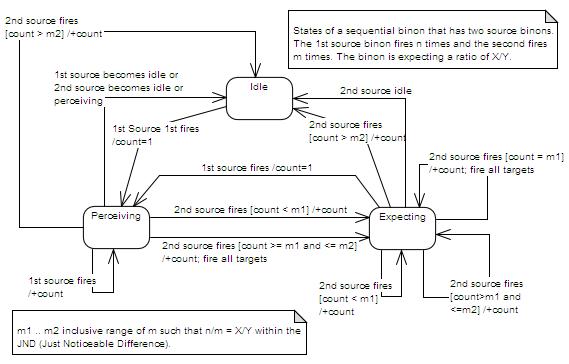
25th October 2015 Sequential Binons
This state machine diagram illustrates all the possible transitions a sequential binon (SB) can make as a result of the activity (firing) of its two source binons (trigger and goal binons) and the state of these two source binons. The SB has a representation of the ratio of the number of times the trigger and goal binons fire. The quantity of trigger firings is referred to as TQ (Trigger Quantity) and the quantity of goal firings is referred to as GQ (Goal Quantity). If the ratio is 1/1 then the SB is expecting that TQ=GQ. A ratio of TQ/GQ = 3/3, 12/12 or 1/1 will all be recognized as a 1/1 ratio. Other examples are:
TQ/GQ Exact equivalent Ratios Equivalents for a 20% JND
6/1 12/2, 18/3 36/7, 54/7
1/6 2/12, 3/18 7/36, 7/54
3/2 6/4, 12/8 28/19, 13/9
2/3 4/6, 8/12 19/28, 9/13
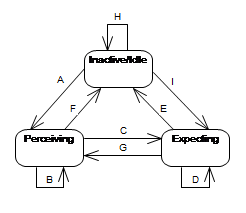
The Active states are Perceiving and Expecting.
Transitions:
A – This occurs when the SB’s trigger source binon fires. A binon fires all its target binons when it fires. The SB counts this firing, initializes TQ=1. Note the trigger binon must be active at this point and it must be in the expecting state, because it cannot have fired in the perceiving state.
B – When the trigger fires a second or subsequent time the SB increments the TQ. The sequential binon also remains in the Perceiving state as long as the trigger or the goal binon is active even if the trigger or goal binon does not fire. This is one or the other being active because it is possible that the trigger binon has become inactive but the goal has become active but not yet fired. The goal binon may be in the perceiving or expecting state and have not yet fired.
C – When the goal binon fires all of its target binons, the SB counts this firing. GQ is set to 1. The SB may fire at this point. For example, if the SB ratio was 6/1 (IDL=9) and TQ = 6 then the SB fires because an exact ratio is recognized. However, if the TQ was 12 (12/1 = IDL of 13) then another firing of the goal binon is expected before the SB can fire. If the TQ was 2 then the TQ/GQ = 2/1 (IDL=3) and transition F occurs.
D – When the goal fires a second or subsequent time the SB increments the GQ. When the TQ/GQ reaches the SB’s ratio, the SB fires. The SB stays in this state as long as the TQ/GQ is within the JND of the SB’s ratio. The SB also remains in the Expecting state as long as the goal binon is active even if the goal binon does not fire. It is not necessary for the trigger binon to be active although it may become active while the SB is expecting.
E – When the SB is in the expecting state and the goal binon fires all of its target binons the SB counts this firing in GQ. If TQ/GQ is greater than the SB ratio using the JND then the SB becomes Idle/Inactive. The TQ and GQ are set to zero. This transition will also occur if the goal binon becomes inactive, even if it has not fired. The state of the trigger binon will not affect this transition.
F – When the SB is in the perceiving state and the goal binon fires all of its target binons the SB counts this firing in GQ. If TQ/GQ is greater than the SB ratio using the JND then the SB becomes Idle/Inactive. The TQ and GQ are set to zero. Even if the goal binon has not fired, this transition will occur if the trigger and goal binons both become inactive.
G – When the SB is in the expecting state and the trigger binon fires all of its target binons the SB sets its GQ to zero and initializes its TQ to 1. The SB may or may not have fired before this occurs and will not fire as a result of it. It starts again in the perceiving state waiting to perceive its ratio of TQ/GQ. Its trigger binon will be in the expecting state and its goal binon may still be active?
H – The SB remains idle even if its goal binon fires. And even when the SB’s trigger or goal binon change their state to active the SB remains idle.
I – It is not possible for the SB to transition to the expecting state from the idle state.
2nd November 2015 IDL Ratio
There are 3 possibilities for the ratio of the TQ/GQ using a JND of 20%.
- Greater than the ratio. For example, 30/1 (IDL=18) is greater than the desired 10/1 (IDL=12). It needs the goal to fire twice more to get it exact = 30/3.
- Equal to the ratio, 10/1 (IDL=12) is exactly equal to the desired ratio, 9/1 (IDL=12) is greater than 10/1 but still calculates to the same 10/1 IDL ratio.
- Less than the ratio, 2/1 (IDL=3) is less than the ratio 10/1 (IDL=12), any more goal firing will produce a ratio less than 2/1, e.g. 2/2 (IDL=0)
It is possible for a TQ/GQ ratio to skip the equal state because of how the mathematics works. Should the binon keep track of the transition from greater to equal or greater to less because it is at these times it fires? No I think it should only fire when it becomes equal. The binon is fine tuned to recognize the ratio, not its passing.
An example: The S-habit is in the expecting state and has a 1/1 ratio so far (IDL=0). The binon wants a 2/3 ratio (IDL= -2) and is waiting for the next goal firing. When it occurs the TQ/GQ is 1/2 (IDL = -3) and this is less than 2/3.
5th November 2015 Stem Binons
As a result of yesterday’s difficulty with the creation of new binons (see Test Run – 1 4th Nov 2015) I have determined I need to create stem binons which become brand new binons when no other existing binon recognizes a particular trigger / goal source binon combination with the same IDL JND ratio. When a familiar binon X is active and fires for the first time it starts counting how many times it has fired as XQ. The first firing will also activate all the other zero or more existing binons that this binon X targets. Whenever one or more of these existing targeted binons changes from the perceiving to the expecting state because its goal binon G has fired, a stem cell (binon) is created for the trigger (X) and goal (G) combination with TQ=XQ and GQ=1. It then “knows of” (is linked to) these active existing targets expecting the same goal. Every time the goal fires the stem binon counts / increments its GQ value. When the goal becomes inactive if there are no existing target binons left standing then the stem binon is brand new for this target X and goal G combination.
If there are no targeted binons for X when it first fires then it counts all its firings until it becomes inactive. At this point a target binon is created with X as its trigger and the next occurring attended to binon as its goal. Does this next occurring binon need to be at the same level of complexity? If none of the one or more targeted binons changes to the expecting state and X becomes inactive the same thing is done.
7th November 2015 Adjacent versus Overlapping
On the 19th October I was experimenting with parts which are tightly coupled inside their structure with overlapping patterns and parts that are loosely coupled and adjacent to each other. The overlapping structure is faster to recognize if it is familiar. The internal pattern of parts is formed from strongly dependent frequently occurring parts. The adjacent parts are more independent and lots more combinations of them exist and can be expected. I have been assuming the overlapping parts form first and then the adjacent one. What if the adjacent patterns of parts form first and then when the adjacent combinations become more frequent the overlapping structures / patterns are formed. This would mean that as soon as I form binons at level 2 and these become familiar I would start combining them adjacently before in an overlapping fashion. In this scenario level 1 binons represent a reading / value and level 2 are the first ones that are symbolic – contain a ratio.
Stem Binons
The stem binon is linked to all the S-Habit binons that have X as their trigger and G as their goal. There could be zero or more of these. Each would have / represent / recognize a different ratio. This is a set P of S-Habit binons. Since a new S-habit binon is only created from stimuli that attention is being paid to and is being practiced it would seem logical that all the S-Habit binons in the set P are being practiced at the same time. The most recent one is used to set the expectation / concentration level. Therefore I could connect all of these in a list of siblings. If all of the binons on the list are inactive when G becomes inactive then the stem binon must be formed from X and G and the unrecognized ratio provided G is familiar.
12th November 2015 Creating S-Habits
We are only creating S-Habits out of those binons that are attended to and only if they are familiar. The idea of paying attention is to practice those that are more interesting. The attended to binons are the ones that attract attention. Novel and interesting ones attract attention but can’t be used to form new S-habits. Currently, the binon to pay attention to is found at the lowest level but highest interest binon on the perception list. The perception list is the list of all binons recognized in the last cycle. If all the binons on the list are familiar then the lowest level one will gain attention. What should gain attention is the highest one on the list. And if a novel or interesting binon is on the perception list it will naturally be at the highest level because it cannot have been used as a source binon for creating a higher level S-Habit.
If I had a sequence of five familiar binons (Fs) that have been recognized as a level 5 binon it would be structured as follows: And then if the next sixth stimulus is familiar and it produces a familiar level 2 binon then there is the possibility of forming a novel level 3 binon (N).
F
FF
FFF N
FFFF F
FFFFF F
Attention would have been paid to the level 5 binon and then to the level 2 binon. The result should be the creation of the level 3 binon representing the last 3 familiar stimuli. Or should it? Maybe attention is paid to the level 2 binon (representing the sequence of the last two stimuli) and no novel level 3 binon is produced. This approach would only produce the novel binon if the last 3 stimuli are found independently of the 1st 3 stimuli. This is similar to the formation of overlapping versus adjacent parts discussed earlier.
For the next analysis I need to uniquely identify the actual binons.
S
P Q
L M N
G H I J K
A B C D E F
When S is the attended to familiar stimulus (the ABCDE sequence has been recognized) it will be deactivated during the performance of the S-Habits when F occurs. The stem binon Sb for S will be created. It will have no goal stimulus. Then K becomes the attended to stimulus. Since it is at a lower level of complexity than S the stem binon Sb for S should be destroyed. The stem binon for K will be created when K is deactivated provided it is familiar.
For the next analysis the next attended to binon T is at the same level as S.
S T
P Q R
L M N O
G H I J K
A B C D E F
When S is the attended to familiar stimulus (the ABCDE sequence has been recognized) it will be deactivated during the performance of the S-Habits when F occurs. The stem binon Sb for S will be created. It will have no goal stimulus. Then T becomes the attended to stimulus. If T is not familiar the stem binon can be cleared. Since no S–>T S-Habit is recognized / active there is no target binon for these two source stimuli. There is no need to add the T goal binon to Sb. When T becomes deactivated during S-Habit execution, form the target binon with the correct ratio based on the known GQ for T. This scenario can also happen when there exists an S–>T S-Habit that was perceiving S but it went directly back to inactive / idle because the ratio was exceeded. This scenario can also happen when there exists an S–>T S-Habit that was ExpectingNotFired because T had fired but not enough times to cause the S–>T S-habit to be recognized. It will not be added to the perception list until it is recognized.
For the next analysis the binon T is recognized and one of S’s target binons U has been recognized and has attracted attention.
U
S T
P Q R
L M N O
G H I J K
A B C D E F
When S is the attended to familiar stimulus (the ABCDE sequence has been recognized) it will be deactivated during the performance of the S-Habits when F occurs. The stem binon Sb for S will be created. It will have no goal stimulus. Then U is recognized and maybe novel, interesting or familiar. U becomes the attended to stimulus. U will be in the ExpectingFired state. T is added to Sb as the goal stimulus and the sibling list for U is added to Sb.
The sibling list is needed because when T is deactivated if there are no siblings of U still active in the Expecting and Fired state then the Sb will become a novel S-Habit. The ratio in this novel S-Habit will be based on the quantity of times S and T have fired. Since the U that occurs may not be the most recent of its siblings the sibling list needs to be a ring so that they can all be checked. If U is left in the ExpectingFired state when T becomes idle then the Sb is cleared and replaced with one for the attended to stimulus.
14th Nov 2015 Practicing
You practice a habit when it is novel or interesting in order to learn it and eventually become familiar. If you only have familiar habits then you don’t have any to practice. When you are practicing you are focusing your attention on a specific type of binon or combination of them. Even though other novel binons could be/are formed / recognized these do not have attention paid to them. They remain subconscious.
16th Nov 2015 Parts and Patterns
I have been experimenting with parts versus patterns in Perceptra 1D. I’ve tried a number of strategies as to when parts should be combined adjacently and when they should be combined in overlap to form new patterns. And then treat these new patterns as parts and again combine them overlapping and adjacently. I’ve been thinking about this in the past at 27th July 2015, 19th October 2015 and 7th November 2015. I am now thinking that patterns are made from overlapping familiar binons and once they become a part they can only be combined adjacently. They become a part when they are found to repeat. Once they are a part they cannot be combined in an overlap fashion. This also means that all the source binons of the part at all lower levels should not be combinable in an overlapping fashion with any other binons other than the ones they are combined with in the part. Or should they?
So, once a part: always a part. Let us assume the level 2 pattern A B has repeated and is now recognized as a part. A and B are level 1 binons and thus must be parts. If we come across A C we can combine them adjacently since they are parts. What if we come across A B C D E? Then A B is recognized as a part and B C is not formed. But C D, D E and C D E can be formed provided that C D and D E are not yet parts. If however D E has been designated as a part then C D should not be formed. This leaves C by itself at level 1 not combined with A B or D E. The algorithm would need to make the first pass over a series of binons and count any that are repeaters adjacent to each other. The next pass it would group the adjacent source binons that are known to form parts. This would leave series of one (like the C in the above scenario) or more binons between the parts. These would be combined into level 2 patterns that are not parts.
What about the scenario in which P = A B C D E becomes a part because it is found to repeat however none of its source combinations is yet recognized as a part. Patterns such as A B C, B C D E, C D and B C could all be formed and be combined in an overlapping fashion with other binons to form patterns. But then let us say B C is found to repeat and is designated as a part. Now when the series P is encountered the 5 level part will no longer be recognized because the pattern A B cannot be combined with the C D beside it. If however, P continues to occur it will be started to be recognized as the pattern A (B C) D E. This is a pattern made up of 4 parts. It’s kind of like having learnt to recognize a specific insect as being made up of different sections always connected together in a certain structure. And then one day find out that a substructure can actually detach and act separately from the whole.
What if instead A B, C D and E are known as separate parts? When they occur in series they can be combined to form a pattern of parts such as (A B) (C D) E.
To summarize the rules;
- All level 1 symbolic binons are parts.
- Parts may repeat beside each other.
- Two different source parts beside each other form a pattern.
- If either of the source parts repeats the pattern will have a non-zero IDL value.
- A pattern becomes a part when it is found to repeat adjacently with itself.
- Parts can only be combined adjacently with other parts.
- Parts cannot be combined with patterns (adjacent or overlapping)
- Parts can contain patterns of parts.
- Patterns that overlap can be combined to form more complex patterns with an IDL of zero.
17th Nov 2015 Independent Parts
Parts are independent of each other. The parts in a pattern however are interdependent. This concept is related to my thinking on 27th April 2014 and even further back to 13th Jan 2011.
Sum of Logs
From my Test Run-1 17th Nov 2015 I think I have an interesting idea. When the same pattern repeats adjacently it is counted. The pattern becomes a part (self-contained, not overlapping with anything). The quantity is used in the IDL of the target binon when a source part is combined with an adjacent source part. However if the source parts come in different sizes then the ratio of sizes should also be taken into account when representing the target binon. This can be done by making the IDL a ratio of the total sizes of the two source binons. The total size of a source binon is the quantity times the size of an individual. This can be represented as one number and the just noticeable difference principle can be applied by using Log(quantity) + Log(size) which is the Integer Sum of Logs (ISL). This would mean that a source binon needs to supply its target with a quantity and a size. The target then calculates its unique identifying value as [Log(Q1) + Log(S2)] – [Log(Q2) + Log(S2)]. This represents the ratio of the total sizes of the two source binons.
27th Nov 2015 Stem Binons
I have been experimenting with the new binon processing and stem binons in the Perceptra 1D software performing parallel perception and realized I need an active stem binon at each level of execution / complexity if a habit is being processed at that level. I have now gone back to the Morse code perception software and started to make changes to the sequential recognition with stem binons. But this morning I have decided that the stem binon should be processed similarly to an active binon with the following properties. Stem binons could be started when each familiar stimulus/binon is deactivated and the goal stimulus that caused it to be deactivated could be associated with that stem binon. An alternative is to start the stem binon when the trigger fires and have it count the trigger firings as all binons do and then add the goal when it is perceived and the trigger is deactivated. Either way the stem binon is in the Expecting state. However it has no ratio IDL and has no expected count of times the goal will repeat. It then gets converted into a regular (non-stem) binon when the goal stimulus becomes inactive or its trigger fires. The other condition on this process is that the goal stimulus must be familiar. Once the regular binon has been created the goal then becomes the trigger for a new stem binon at this level.
30th Nov 2015 Adjacent S-Habits
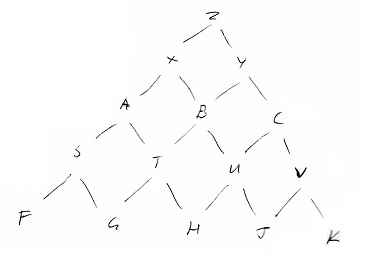
I’m faced with the difficulty of figuring out how to handle adjacent (in time) S-Habits at high levels. For example I want to be able to recognize the repeating of a sequence such as ABCABCABC in time. The dynamic sequential binon structure ends up looking like:
F F F
D E D E D E
A B C A B C A B C
In which D = AB, E = BC and F = DE.
The F binon must stay in the Perceiving state after the first ABC for long enough for the next F to occur if it is to count adjacent repetitions of ABC S-Habit. Maybe the solution is for each binon to have a decaying process (a countdown timer) which lasts long enough to detect if the next binon recognized at the same level is a repeat / the same of different. And the countdown timer gets reset if a repeat is detected. If it counts down to zero then the binon becomes inactive.
As a result of starting to implement this idea I realized that it might work this way as long as a binon goes back to Perceiving instead of Idle when it is expecting fired or not and its goal stimulus does not repeat or becomes inactive. It then stays active in the Perceiving state for one more firing of the stimulus at its trigger level before becoming inactive. As a result its target binon if active stays active as well. It creates a wave of inactivity that progresses up the tree one level of complexity per cycle of recognition at the lowest level.
1st Dec 2015 Inhibition
This wave of deactivation must go down the binon tree immediately after the activation / perception wave goes up the binon tree. The deactivation wave is a process of inhibiting a target binon when it’s in the Perceiving state and both its two source binons are inactive. And binons that are expecting and have their goal stimuli inactive become perceiving. Effectively the inhibition / deactivation wave desensitizes the binons. Those with the longer time frame recognition at the top of the tree take more cycles before becoming inactive.
Then the question arises, is this deactivation wave the same process that causes the “paying of attention”? And what about the wave of potentiation / set / priming / enabling for purposes of performing actions?
Referring back to the diagram of 25th October the transitions that must be changed are the ones for deactivation:
B – The sequential binon (SB) remains in the Perceiving state as long as the trigger or the goal binon is active even if the trigger or goal binons do not fire. This is one or the other being active because it is possible that the trigger binon has become inactive but the goal has become active but not yet fired. The goal binon may be in the perceiving or expecting state and have not yet fired. Thus, if both the source binons are inactive the SB becomes inactive as in transition F.
D – The SB remains in the Expecting state as long as the goal binon is active even if the goal binon does not fire. It is not necessary for the trigger binon to be active although it may become active while the SB is expecting.
E – While the SB is in the expecting state this transition does not occur if the goal binon becomes inactive, even if it has not fired. Transition G occurs in this situation.
F – This transition will occur if the trigger and goal binons both become inactive.
G – The SB is in the expecting state and may or may not have fired when the trigger binon fires. It will transition to the perceiving state waiting for the trigger to repeat or the goal to fire. This transition is also taken when the goal binon becomes inactive.
H – The SB remains idle even if its goal binon fires. And even when the SB’s trigger or goal binon change their state to active the SB remains idle.
Effectively the sequential binon transitions from idle to perceiving, to expecting as source binons fire and it returns from expecting back to perceiving and then to idle as its source binons become inactive.
2nd December 2015 Deactivation
It only makes sense that the transition G from Expecting back to Perceiving occur if in the Expecting Fired state. The pattern has been recognized and now we want to detect / recognize a repeat of it adjacent in time. The XQ should be kept so it can be incremented should the binon fire again. The TQ should be set to zero. If it is in the Expecting Not Fired state transition E from Expecting to Idle should occur because the binon has not been recognized yet and you can’t expect to perceive a repeat. Similarly, if in the Expecting Fired state and the goal stimulus should occur, causing the ratio to be exceeded then transition E should occur. A repeat is not possible for this binon. A binon in the Perceiving state with a TQ of zero is waiting for its trigger to occur for the 1st time. If any other stimulus fires, even the goal stimulus, the binon will become inactive, transition F. Maybe this Perceiving with zero TQ state should be given a different name. How about Deactivating? From Deactivating it can transition to Perceiving if the trigger binon fires and to Idle if any other stimulus occurs. And Deactivating is considered an active state for determining the state of a source binon in transition B.
8th December 2015 Enabled state
As I work through the use of the Deactivating state to place a binon in a state in which it retains how many times it has repeated so far I start to see parallels with the concept of a binon in an enabled state. The enabled state is what happens when a binon has attention paid to it. It is the potentiated / set / ready state. And retaining a count of how many times a stimulus has repeated is a conscious act. You have to attend to / remain aware of the repeats to know how many have occurred. As soon as you pay attention to some other stimulus you lose track of the repeat quantity. Or in binon terms as soon as the binon switches out of the enabled state the XQ value becomes zero. And the attention act seems to travel down the binon tree just like my deactivation wave which I am trying to use to keep high level binons enabled long enough to catch them repeating.
12th December 2015 Deactivation
Yesterday I determined that the deactivation to idle transition that proceeds up the tree but only one level per cycle should only be done when there is a change in the property binon to which attention is focused. I have implemented this transition by traversing the binon tree from top to bottom and making the transition from deactivating to idle if the goal binon is idle. I think I could also implement it by traversing the binon tree from bottom to top and stopping when the first transition is done. Then each time the perceived property binon changes one higher level will transition from deactivating to idle.
26th December 2015 Binon states
Based on the fact that binon tree processing only needs to be performed when there is a change in a property binon I have reduced the states for a binon from 5 to 3. The property binons count their repetitions and the quantity of the repetitions is only available / perceived when the sensor detects a change in value and a different property binon starts to count its occurrences. The change triggers the processing of the previous property binon. The current property binon is triggered and is counting its repeats and does not fire / become recognized / perceived until it has finished counting. And that is only when the next change occurs.
The three states are Idle (Inactive), Triggered (was called Perceiving) and Fired (was called Expecting Fired). Triggered and Fired are the Active states. A binon transitions to Triggered when its trigger binon fires and it remains in this state counting the firing of its trigger binon. When its goal binon fires it stays in the Triggered state until the count of goal binon firings causes the IDL value for the binon to be matched. When matched it transitions to the Fired state and fires all of its target binons. The binon stays in its Fired state for the duration required for the start of a repeat to be detected.
Stem Binons
One of the challenges is to determine the processing required for a stem binon to recognize a new binon. This is especially tricky when it comes to recognizing repeats at a level of complexity higher than 1. It is easy to process stem binons to recognize patterns in which the trigger and goal binons overlap because the goal needs to be perceived / fired immediately after the trigger has fired. If there is any gap between two high level binons being perceived in which nothing is recognized at the same level no combination of trigger and goal binon can be formed. But to detect a repeat of a high level binon is more complicated. For example consider a level 3 binon to recognize the repetition of ABC. Assuming all the binons are familiar the binon tree to recognize this looks like:
L X
J K V W
G H I G G S T U S S S
D E F D E D E P Q R P Q P Q P Q
A B C A B C A B C M N O M N O M N O M N O
To help understand this tree, D=AB, E=BC, F=CA, G=DE, H=EF, I=FD, J=GH, K=HI and L=JK. When the second G is perceived the binons that are in the Fired state are C, E and G. Binons I, K and L will have been in the Fired state waiting for their repeats to occur at these higher levels. However because the repeat of G is perceived first (we process the tree from bottom up) any active binons between the previous and this G tree are deactivated / idled. These binons are H, I, J, K, and L. The algorithm for this is to do the following for each of the perceived binons C, E, and G. Idle all the directly and indirectly targeted binons that they trigger. For example C triggers its target F and F triggers its target I. Idle binons F and I. Do the same for the directly and indirectly targeted binons of E and G. The note from 27th July 2015 is important here to realize that once a high level binon repeats no binon can be recognized that overlaps with any part of the lower level source binons. The edge between C and A is kept clear of overlapping binons.
Now the question is how to process stem binons that recognize the repeating G as a trigger followed by the repeating S as a goal? When the first G is recognized a level 4 stem binon will be formed with G as the trigger, TQ =1, and an unknown goal binon. When H is perceived the H will be the stem binon’s goal with GQ=1 and the combination will be used to create J. However, J may already exist. The stem will not wait for a repeat of G, as a trigger, or H as a goal because the XQ for G is only 1 as is the XQ for H only 1. The stem binon will then have H as its trigger with TQ=1 and its goal will be unknown. By the time the second G occurs the stem binon will have the I as its trigger with TQ=1 and an unknown goal. The G binon will have stayed active long enough for it to be in the triggered state caused by the second D and with the firing of the E the G will fire and its count XQ will equal 2. The stem binon with trigger I (TQ=1) will not form the IG combination with a ratio of 1/2 because the I will be idled as explained in the previous paragraph. Also note that IG with a ratio of 1/2 has not occurred. It represents the sequence CAB ABC ABC. Instead the stem binon must set its trigger to G with TQ=2 and an unknown goal. It must now wait for repeats of G and count them. Between the G repeats no other level 3 binon will be perceived because they are cleared as described in the previous paragraph. If a different level 3 binon is perceived within the stem binon’s deactivation period then this is the goal binon S. The stem binon in the Triggered state expecting another G must be deactivated should another G or S not occur in the correct time frame.
When S is perceived the stem binon needs to set its goal stimulus to S and GQ=1. It is now waiting for the S to repeat or the deactivation period for S to expire.
27th December 2015 Four Binon States
I think I need four states for binons. They need to be in an active state (Perceiving) in which the triggering source binon can repeat. They also needed to be in an active state (Triggered) in which the trigger has finished repeating and they are waiting for the goal source binon to repeat enough times so the IDL ratio can be reached. Then they need to be in the Fired state long enough to be kept active by the firing of their trigger binon so they can keep count of how many times they repeat. And the forth state Idle.
Three Stem Binon States
The stem binon needs three states; Idle Perceiving and Triggered. If it is in the Idle state then it has no trigger or goal binon. Once the trigger is known it is in the Perceiving state waiting for trigger repetitions. Once the goal is known it is in the Triggered state waiting for the goal to stop repeating. When the goal stops repeating, it fires and returns to the Perceiving state with the goal as the new trigger.
Do I need two stem binons per level? One would be checking for patterns of overlapping stimuli while the other would be checking for patterns where the trigger or goal binon repeats. In yesterday’s description I documented how the GHI sequence would be captured in the stem binon and then how the G with XQ=2 would reuse the same stem binon to start detecting repeats of G. However when it gets the first S instead and it is the goal source binon how is the STU sequence not captured by the stem binon? If it were to wait for the second S it will have missed the opportunity to create the V=ST and W=TU binons. If the stem binon were to process the ST and TU binons it will lose the TQ value for the number of times G repeated. It needs to stay in the detecting repeating goal binons mode until S does not repeat. At least a regular (non-stem) binon knows its ratio of trigger to goal source binons and can wait until the ratio is reached or not.